具身智能[17]
Flywheel AI发布挖掘机远程遥控与自动驾驶技术堆栈,并开源百小时真实数据集
自动驾驶技术正加速渗透重型机械领域,初创公司Flywheel AI推出挖掘机远程遥控与自动驾驶技术栈,以非侵入式机械改装破解液压控制难题,兼容多数品牌设备。其FlyOS技术栈含远程操控、环境感知及模型训练模块,远程操作提升高危场景安全与15%作业效率,还开源100小时真实施工数据集,推动行业智能化进程。

AI驱动机器人断肢自适应新突破:单一模型实现极端损伤下持续运动
AI机器人展现惊人“类生物韧性”,断肢后仍能调整重心、滑行前进。深度强化学习与元学习赋予其动态适应能力,单一模型可驾驭多形态机器人,极端损伤下自主生成运动策略。该技术为救灾、探险等复杂环境任务提供关键支撑,重新定义机器人生命力。
OpenAI押注人形机器人:AGI竞赛进入具身智能新阶段,2025年将迎大规模落地
OpenAI正将战略重心转向人形机器人研发,通过具身智能加速AGI落地,与Figure合作推进“大脑+身体”一体化系统。依托多模态大模型与硬件革新突破技术瓶颈,人形机器人凭借环境自适应与跨场景泛化能力摆脱“笨拙”标签,有望成为2025年科技产业新主角。
灵犀X2全球首秀韦伯斯特空翻 稚晖君揭秘背后技术
智元机器人灵犀X2双足机器人成功解锁"韦伯斯特空翻",成全球首个完成该动作的人形机器人。突破动力学控制、实时感知反馈与硬件可靠性三重极限,依托强化学习与Sim2Real技术实现动作自主优化。其多场景布局及2025年量产计划,标志具身智能技术迈向实用化。
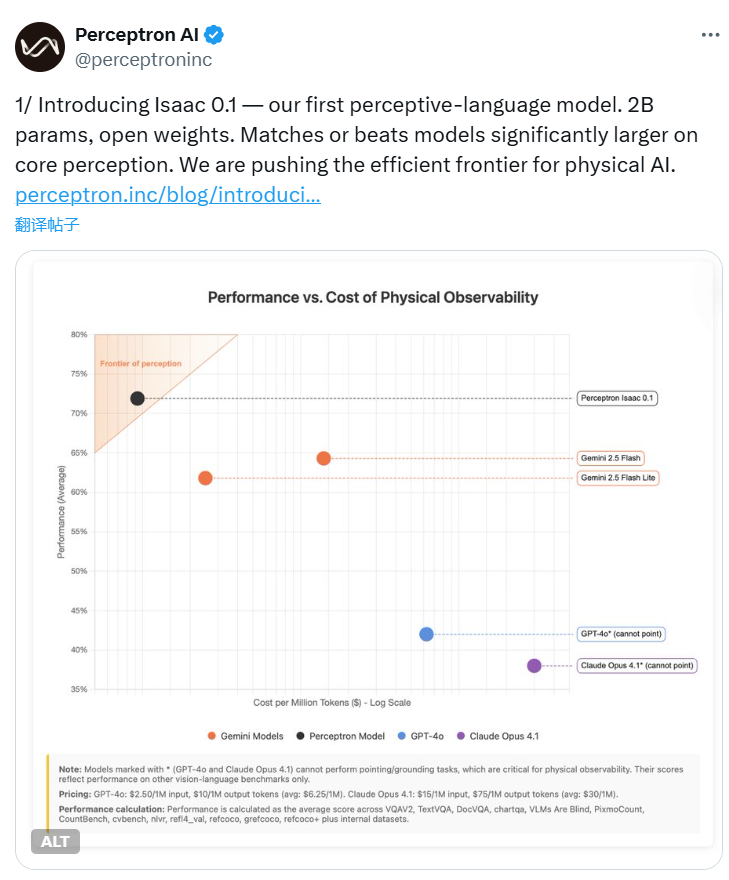
Perceptron发布Isaac 0.1:2B参数开放权重感知语言模型挑战大型模型性能极限
AI初创公司Perceptron发布感知语言模型Isaac 0.1,以20亿轻量级参数,通过统一编码框架甩掉视觉外挂,核心感知任务超越更大模型。开放权重策略加速物理AI落地,适用于机器人、智能家居等场景,开启效率革命新方向。

宇树科技开源UnifoLM-WMA-0:机器人动作预测通用世界模型
宇树科技开源世界模型UnifoLM-WMA-0,实现机器人动作预测与环境仿真一体化,通过双模式架构精准预判物理交互后果,降低试错成本,推动通用机器人从被动执行向主动决策升级。开源代码、模型权重及推理工具已上线GitHub,助力开发者快速应用于机械臂抓取、避障等场景。
Dyna Robotics完成1.2亿美元A轮融资 科技巨头参投推动机器人AI基础模型发展
Dyna Robotics完成1.2亿美元A轮融资,估值突破6亿美元,CRV、First Round Capital及Nvidia、Amazon等巨头参投。公司聚焦机器人AI基础模型赛道,研发通用智能底座,解决传统机器人跨场景适配难题,推动行业从自动化迈向智能化。资金将用于技术研发、产品落地、人才布局及生态合作,加速机器人智能化转型进程。
华为发布全新机器人学习开源Python框架Ark
华为诺亚方舟实验室等联合推出开源Python机器人学习框架Ark,旨在解决传统机器人开发依赖C/C++、学习门槛高、工具链分散等瓶颈。框架深度兼容PyTorch等AI生态,支持仿真与实机无缝切换,兼顾Python易用性与高性能,助力降低开发门槛、加速机器人自主智能创新。
全球首个商业化叠衣机器人Isaacs正式上岗洗衣房
全球首个商业化叠衣机器人Isaacs于旧金山Tumble Laundry洗衣房正式上岗,由前苹果AI高管团队创立的Weave Robotic研发。其搭载自主VLA模型,实现70%自主叠衣,AI主导+人工辅助提升效率,解决传统机器人痛点,开启智能叠衣服务商业化时代。
Pollen Robotics开源"Amazing Hand"灵巧手:双手协同高精度,低成本驱动机器人灵巧操作革命
Pollen Robotics发布的开源“Amazing Hand”灵巧手双手机器人原型,凭借模块化设计与高精度控制实现技术突破:每手集成9关节6执行器,拇指支持对掌运动,可抓取0.5毫米至50毫米物体;磁性编码器提供0.1°关节反馈精度,能稳定操作0.8毫米间距芯片引脚。开源生态通过3D打印核心构件将单手套件成本压至200美元(仅为商用灵巧手1/20),GitHub开源设计文件、代码及ROS驱动吸引1700+星标开发者协作,已迭代触觉传感等功能。双手协同系统解锁工具切换、0.2毫米误差精密装配及动态抛接等复杂操作,在医疗微创手术、工业精密装配、核废料处理等场景落地测试。目前社区正优化肌腱耐久性(寿命提升至20小时),计划2025年推出商业套件,推动灵巧操作技术低成本普及。